Praxisrelevante Methoden bei der Entwicklung moderner Informationssysteme
werden anhand konkreter Aufgaben, u.a. im Zusammenhang mit der Steuerung
eines Industrieroboters, erarbeitet und präsentiert.
Den Teilnehmenden wird empfohlen, sich bereits vorab mit einer strukturierten,
prozeduralen Programmiersprache (wie C oder Fortran) vertraut zu machen,
z.B. durch Besuch der Vorlesung PG 1.
Vorkenntnisse in objektorientierter Programmierung werden nicht voraus gesetzt.
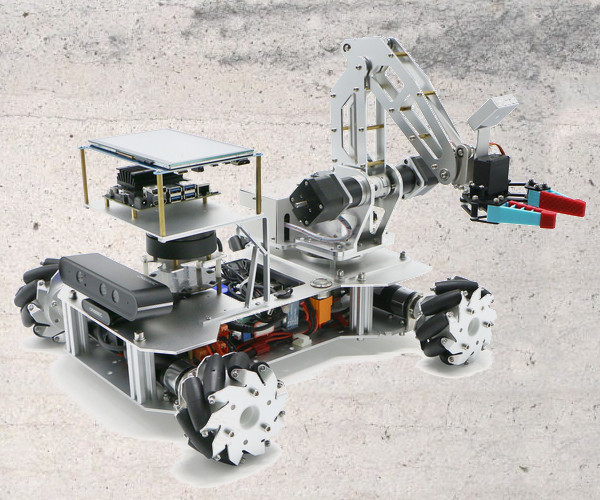
Die im Projekt verwendete Hardware-Plattform ist der ''Roboworks Pickerbot''
mit einem NVIDIA Jetson TX2 Boardcomputer.
In diesem Kurs für Teilnehmer:innen aus dem Grundstudium
werden wir uns auf elementare Aufgaben konzentrieren
(Wegfindung mit klassischen Routing Algorithmen usw.).
|
|
|
|